Introduction
The purpose of the Student Research Symposium (SRS) is to showcase both undergraduate and graduate science research in a relaxed, interdisciplinary setting. Any science student involved in research is encouraged to give a presentation at this event.
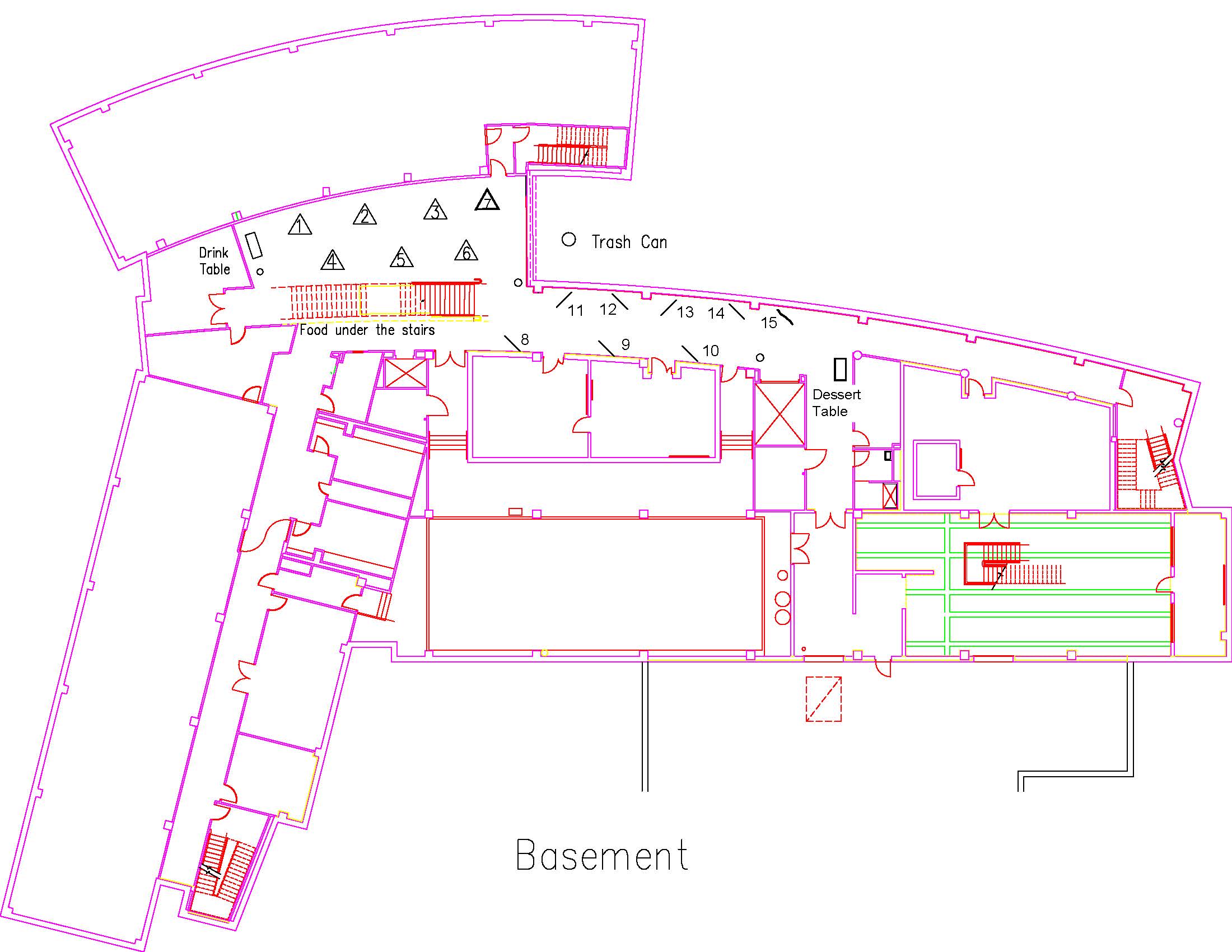
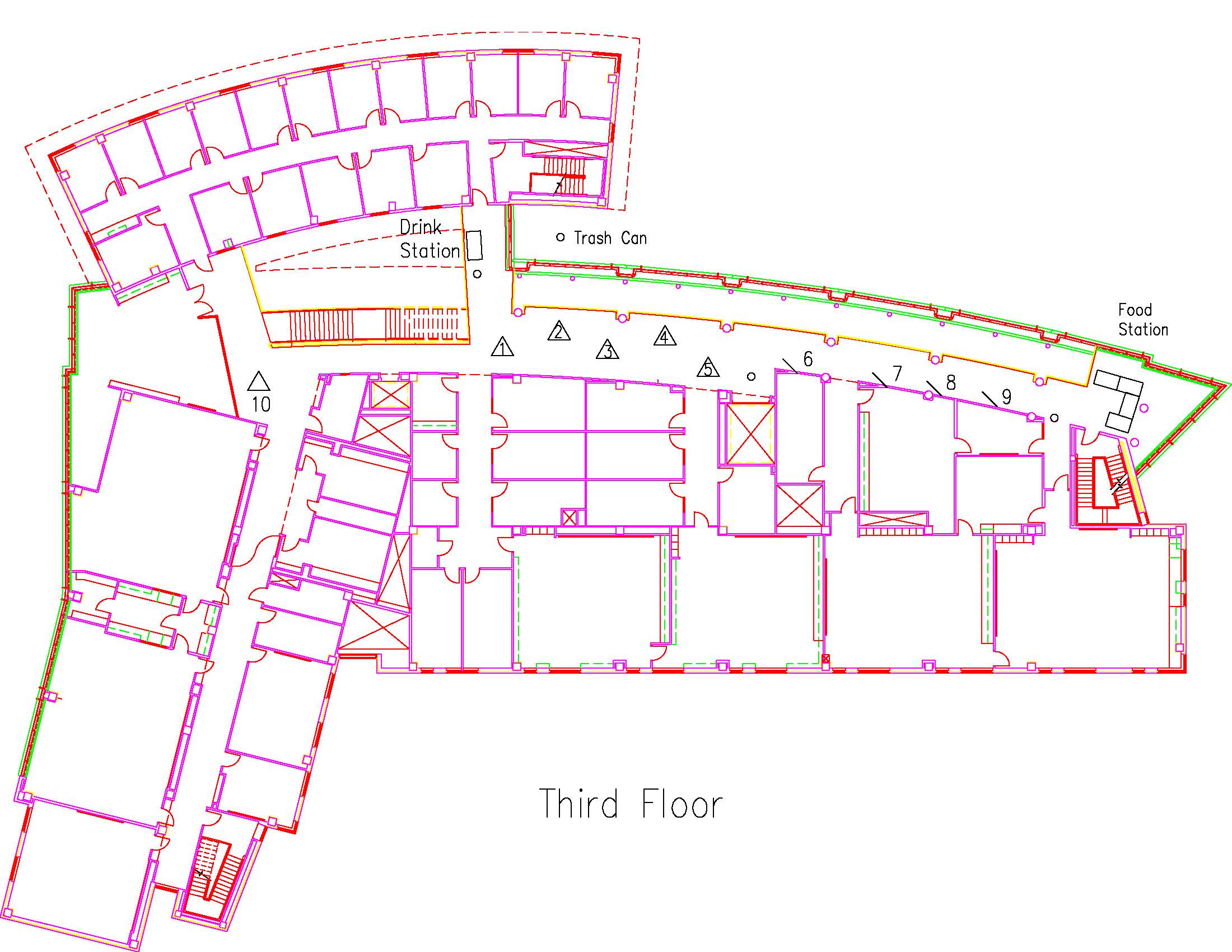
2024 SRS Presentation Floor Plans
Basement: https://srs.tcu.edu/media/building_layout/2024Level0.jpg
1st Floor: https://srs.tcu.edu/media/building_layout/2024Level1.jpg
2nd Floor: https://srs.tcu.edu/media/building_layout/2024Level2.jpg
3rd Floor: https://srs.tcu.edu/media/building_layout/2024Level3.jpg
{kind=link}
{kind=link}
{kind=link}
{kind=link}







Keynote Speaker: Dr. Rebekah Naylor 2024

Title: TBA
About The Speaker
Dr. Naylor established the Mercy Clinic in Fort Worth, Texas where many CSE students frequently volunteer, as well as helped found a nursing school in India. Naylor spent more than 35 years serving as a general surgeon, evangelist and church planter in India. Devoting 28 of those years to the people of Bangalore, Naylor worked as chief of medical staff, administrator and medical superintendent in the Bangalore Baptist Hospital. She also oversaw construction of the Rebekah Ann Naylor School of Nursing in 1996, served as a professor of anatomy and physiology at the school and celebrated the first class of nursing graduates in 1999. Upon her return to the United States, Naylor joined the faculty of UT Southwestern Medical School in Dallas, taught in the surgery department and was later named associate clinical professor of surgery where she served until her retirement in 2010. She also received the Pro Ecclesia Medal of Service from Baylor University.
Participation
Participation in the Symposium offers students practical experience in giving presentations in a professional but relaxed setting. It is also a fun social event where students can learn about research in other departments in the College.
Announcements
-
The presentation floor plans have been posted on the website homepage.