ENGR2019AGUEROADAME49081 ENGR
Engineering Capstone Project - Computer Vision
Type: Undergraduate
Author(s):
Melina Aguero Adame
Engineering
Susana Murillo
Engineering
Advisor(s):
Stephen Weis
Engineering
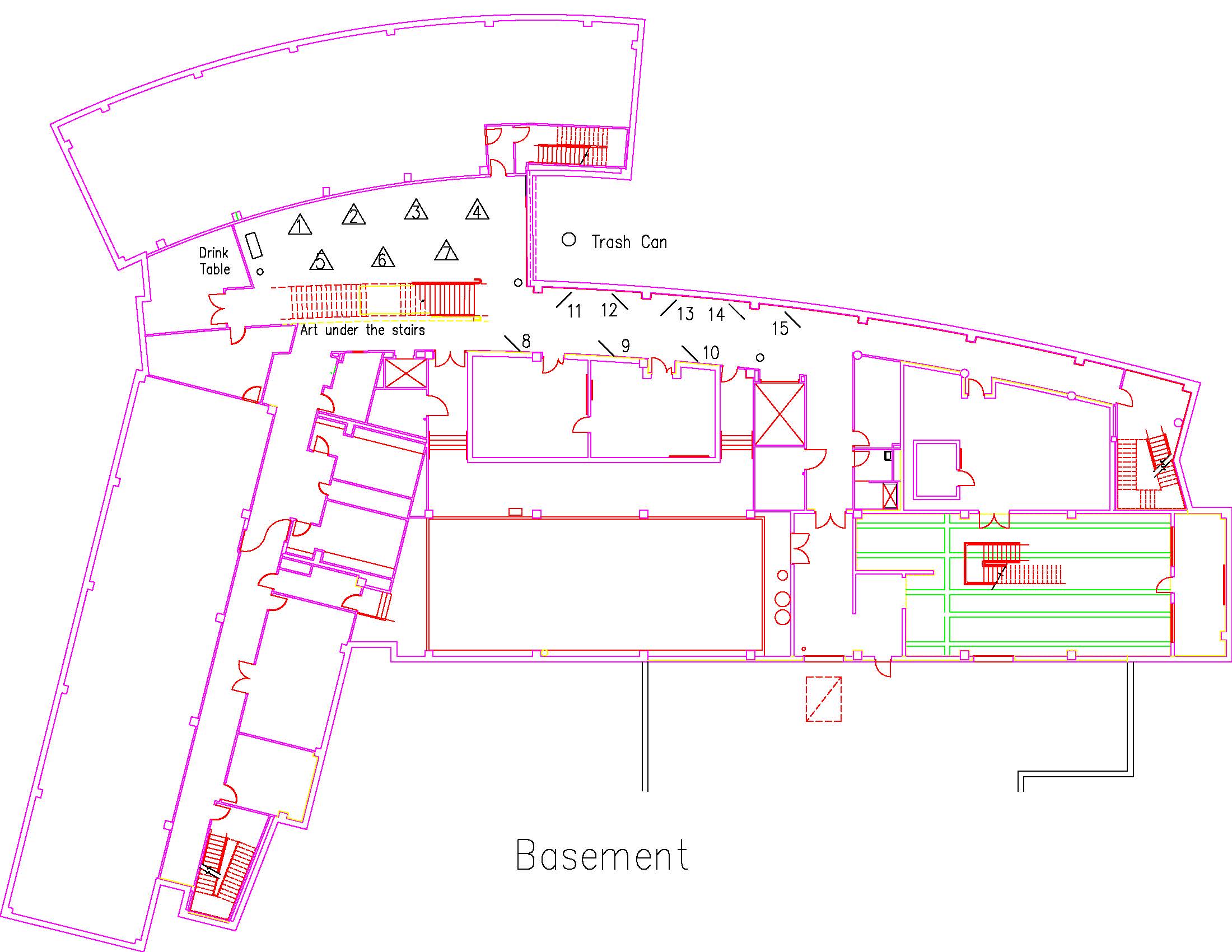
Location: Session: 1; Basement; Table Number: 6
View PresentationAs part of one of the engineering capstone projects, a calibration testing system was improved with the aid of computer vision. Computer vision was integrated into this project as a solution to a rotating pedestal calibration test that was previously performed by the naked eye. The main goal of this system was to detect and track a red 635 nm wavelength laser spot with offsets as small as 0.025 inches on a 10 x 10 inch grid accurately and precisely. Designing this system involved three major criteria: camera selection, data processing hardware, and algorithm performance.
The first criteria studied in the design process was the camera. The system required a camera that was compact in size, covered the entirety of the grid at less than 11 inches, and captured high quality images. Furthermore, two main data processing hardwares were explored: Raspberry Pi and a standard test laptop. The processing hardware criteria considered were speed, portability, and maintenance. Finally, RGB and houghcircles were the two algorithms used to detect the red laser dot. Testing was conducted to compare the algorithms based on their ability to detect the laser spot, precision in tracking, and repeatability. These design considerations guided the down selects for the final components used in this system.
ENGR2019BIESEMEIER44452 ENGR
Design and Development of an Actuation and Extraction Force Tester: Programming
Type: Undergraduate
Author(s):
Thomas Biesemeier
Engineering
Zach Hollis
Engineering
Ben Krause
Engineering
Talha Mushtaq
Engineering
Advisor(s):
Robert Bittle
Engineering
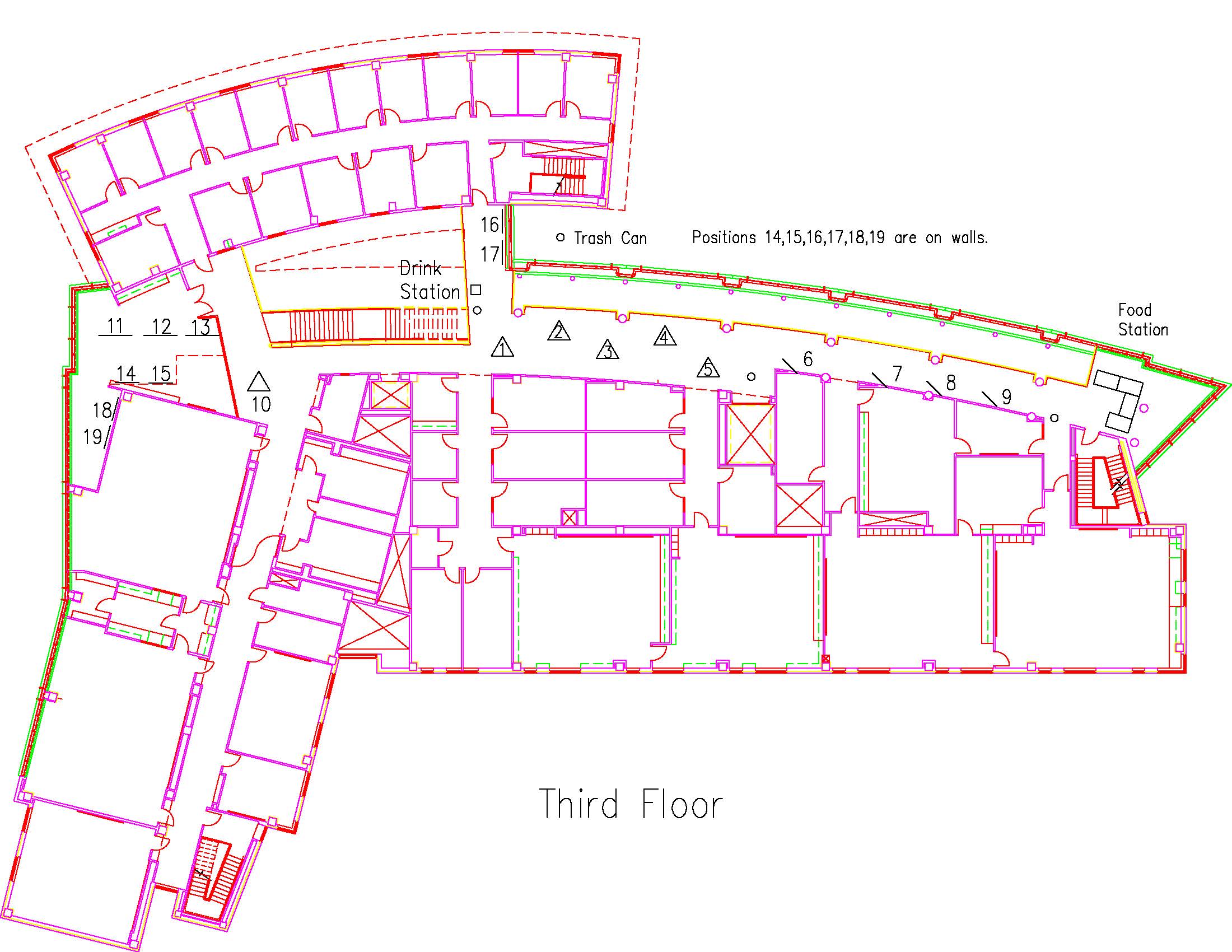
Location: Session: 2; 3rd Floor; Table Number: 3
View PresentationThe LabVIEW team for the Applied Avionics Inc. project focuses on fully integrating the programming of all electrical components with LabVIEW. The major requirements for this project include utilizing LabVIEW to display and capture data feedback, completely automate the testing process, and to read and send data directly to AAI’s database. By creating an actuation and extraction feedback machine that is fully LabVIEW controlled, a variety of switch body types were able to be accommodated and tested. The machine has been shown to decrease variability of results and improve the efficiency of AAI’s current process in all aspects required.
ENGR2019CLARKE58037 COSC
AWS for HealthCare
Type: Undergraduate
Author(s):
Kenzie Clarke
Computer Science
Kien Nguyen
Computer Science
Advisor(s):
Cuiling Gong
Engineering
Liran Ma
Computer Science
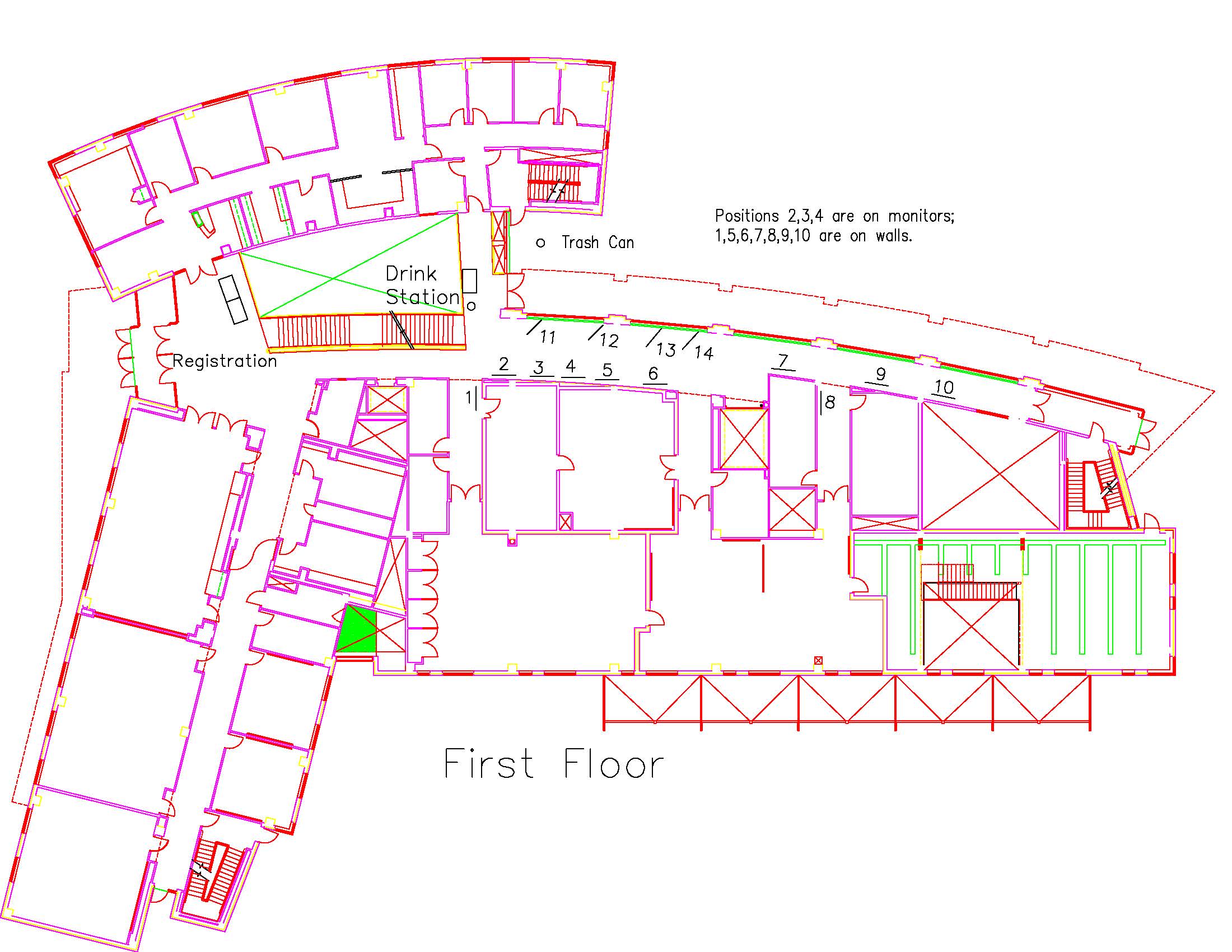
Location: Session: 1; 1st Floor; Table Number: 4
View PresentationCloud based services such as IBM Cloud and Amazon Web Services provides a new platform for data collection, storage and processing through the internet that enables environment monitoring via wireless sensor networks. In this project, we would like to develop a cloud-based low power monitoring and notification platform using AWS. Most existing notification platforms are provided as an expensive, closed system that do not allow flexibility and is often difficult to troubleshoot. These systems require special hardware (such as unique walkie-talkies) and upgrades are pushed back due to costs.
Our system will utilize AWS Lambda functions, a cloud database, and IOT buttons so that medical staff can receive and store real time patient vitals and notifications with a data forwarding device such as a smart phone, tablet, or computer. AWS solutions are low-cost and flexible, allowing the care centers to customize the functionality to their specific needs. These buttons do not require wired power supply and have a long-lasting battery.
ENGR2019DECK64177 ENGR
HyPIR Electrolysis for Potassium Hydroxide Solutions at Different Laser Specifications
Type: Undergraduate
Author(s):
Trystan Deck
Engineering
Aliesha Rau
Engineering
Advisor(s):
John Fanchi
Engineering
Location: Session: 2; 2nd Floor; Table Number: 9

View PresentationWe are presenting a method referred to as Hydrogen Production by HyPIR Electrolysis. The method increases the rate of hydrogen production from a 1 molar potassium hydroxide and water solution under 6 volts when an infrared laser is irradiated with an optimum wavelength of light through a cell and concentrated on exposed copper electrodes. The irradiating light facilitates the dissociation of water by stretching the hydrogen oxygen bonds and increasing the rate of hydrogen production. Production of hydrogen due to the class 4 laser is altered by the specifications of laser energy, pulses per second, and spot size.
ENGR2019DEVOOGHT49649 ENGR
FDM 3D Printing Mechanical Property Testing
Type: Undergraduate
Author(s):
Luke Devooght
Engineering
Melina Aguero
Engineering
Advisor(s):
Becky Bittle
Engineering
Location: Session: 2; Basement; Table Number: 6
View PresentationIn this experiment, the mechanical properties of 3D printed specimens of different printing parameters were tested under tension. The printing parameters of these specimens were: surface resolution, infill density, and print orientation. Parts were printed in Onyx nylon with a Fused Deposition Modeling (FDM) printer called the Markforged Onyx Pro. Factorial sets of specimens using all various parameters are printed and tested to create a reference table for future engineering projects. Specimens are then printed as composite variations with continuous fibers in order to understand the benefits a composite may have.
ENGR2019NIKOLAI12345 ENGR
Stock Car Suspension Stiffness Ratio Analysis
Type: Undergraduate
Author(s):
Danny Nikolai
Engineering
Advisor(s):
Mike Harville
Engineering
Location: Session: 1; 2nd Floor; Table Number: 6
View PresentationA racecar’s suspension is one of the key contributors to its performance on a track. Each component – springs, shocks, links, etc. – can be dealt with as a variable within a mathematical model. There are hundreds of combinations of these variables, with each change affecting the stiffness ratio. Using the sway bar as the variable of interest, data acquisition, and computer modeling, a mathematical was developed for predicting the stiffness ratio as a function of sway bar diameter. This model can simplify the time-consuming iterative process that is “racecar setup” by allowing a race team to plug numbers into an equation to make predictions instead of conducting on-track test sessions to determine the results of each component change.
PDF: Attached to this email.
ENGR2019PRASAI24291 ENGR
Remote Controlled Robotic Arm Vehicle
Type: Undergraduate
Author(s):
Chris Prasai
Engineering
Mike Tran
Engineering
Advisor(s):
Morgan Kiani
Engineering
Location: Session: 1; 1st Floor; Table Number: 2
View PresentationIn our project, image tracking was employed to provide a honing mechanism for a robotic "scorpion tail" attached to a small Remotely Controlled Vehicle. The car will be controlled wirelessly through a web interface, with mobile phones being the target user. Like the Mario Kart Versus Mode, where multiple cars drive and bump into each other, the vehicle will be controlled wirelessly while the "tail" is actively seeking targets and upon close proximity will "pop" the balloon. Each car will have 3-5 balloons to start, and the objective of the tournament will be to hunt down the remaining cars and “pop” their balloons, until all cars lose their balloons and the victor remains with at least one balloon intact. Python and Google Cloud were used to make a server with for the mobile website, and C++ was used to relay the commands sent wirelessly to the vehicle's two DC motors. Image tracking was implemented using the popular computer vision OpenCV library in python. The research will conclude with a tournament on Pi day (March 22, 2019).
ENGR2019PRASAI45528 ENGR
Object Detection and Retrieval Using Low-Cost Autonomous Robotic Vehicle
Type: Undergraduate
Author(s):
Chris Prasai
Engineering
Michael Chau
Engineering
Armando Romero
Engineering
Mike Tran
Engineering
Advisor(s):
Morgan Kiani
Engineering
Location: Session: 2; 1st Floor; Table Number: 2
View PresentationIn our project, we aimed to design an autonomous rover similar to that of the popular Mars rovers such as Curiosity. Our rover employs a differential drive system with two continuous rotation servo motors that are controlled with the popular ROS robotic programming library in C++ and Python. A navigation algorithm employs the known position of the robot gathered from a magnetic encoder on the motors and the multiple optical range fidners placed around the vehicle to avoid obstacles on route to its destination. A camera is employed to detect target objects for simple pick-and-place tasks using its DC motorized gripper placed at the front of the vehicle. We have successfully built this vehicle and will demonstrate its capabilities at the 2019 IEEE R5 robotics competition in Lafayette, Louisiana as well as at the SRS presentation day.
ENGR2019STANEK50106 ENGR
Design and Development of a Beam Expander
Type: Undergraduate
Author(s):
Hannah Stanek
Engineering
Emma Birbeck
Engineering
Advisor(s):
Stephen Weis
Engineering
Location: Session: 1; Basement; Table Number: 9
View PresentationRotating Precision Mechanisms, Inc. (RPM) requested that TCU Senior Design update their current Laser Position Accuracy Test Set, which utilizes a laser to calibrate rotating pedestals. RPM positions this test system at a range of distances from a rotating mirror, passes a laser beam through an optical system to the rotating mirror, and measures the offset of the reflected laser dot in order to test the pointing accuracy and repeatability of their positioners. RPM requested that the redesigned test set deliver a reflected laser dot size within 0.125 inches when the test system is any distance between 10 and 100 feet from the rotating mirror. Our prototype for the redesigned Laser Position Accuracy Test Set relies on an optical component called a beam expander to cleanly extend the laser beam at the desired dot size over the specified range of distances. In order to design and manufacture this beam expander, our team researched optical collimators, beam expanders, and lenses in addition to using an Optical Ray Tracing software to model potential beam expander designs. After constructing and testing a working prototype, we completed several iterations in order to improve the resulting laser dot size. Finally, we compared our beam expander design to an Edmund Optics research grade beam expander to further quantify the success of our design.
ENGR2019THACH59309 ENGR
Design of Robotics Vehicle with Autonomous Navigation And Obstacle Avoidance
Type: Undergraduate
Author(s):
Bao Thach
Engineering
Sam Adams
Engineering
Ben Krause
Engineering
Irene Kwihangana
Engineering
Chris Prasai
Engineering
Advisor(s):
Morgan Kiani
Engineering
Location: Session: 2; 3rd Floor; Table Number: 4
View PresentationIn our project, a control-theory based algorithm would be employed to develop a small electric vehicle that can self-navigate through an unknown course to arrive at the desired location while avoiding obstacles and walls. This project is an extension of our successful project funded last year, in which we were able to operate a partially autonomous car to run around a location, and generate a virtual map. Our team expects to grant the car full autonomy like a self-driving car and let it travel through a relative abundance of places to create computer models of critical infrastructures without the help of humans. The success of this project will have a broad impact on society. First, this capability would be useful in self-driving cars, which allow drivers to spend their time more productively instead of driving to work or assist disabled people. Second, the car can generate a simulated model of places that help to analyze unknown locations. Finally, the project can surely create a platform for future TCU engineering students to learn about self-driving car technology and machine learning. This project is expected to succeed due to the achievements we gained from the previous project.
The algorithm will be written in Python/ROS, controlled by Raspberry Pi 3, and tested on a walled course constructed by us. It should be able to navigate a course, without having already driven through it. Another special feature is that the car will also precisely arrive at a pre-determined location.