ENGR2022HEWITT52353 ENGR
Hydrodynamic Analysis of Surfboard Fin Performance
Type: Undergraduate
Author(s):
Brent Hewitt
Engineering
Advisor(s):
Robert Bittle
Engineering
Location: Second Floor, Table 7, Position 1, 1:45-3:45
View PresentationHydrodynamic Analysis of Surfboard Fin Performance set out to analyze how the outline and size of a surfboard fin can impact performance. Performance analysis involved running images from the manufacturer’s website through a MATLAB code that would process the image to determine an appropriate, numerical method, based on fluid dynamics, to explain categorical differences between fins. After testing for differences between categories for the following performance metrics: the vertical line of action, the horizontal line of action, the ratio between the tip area and the rest of the fin, and the resulting angle created by comparing the vertical and horizontal lines of action, the angle was found to be the most statistically significant factor for determining fin categories. Moving forward, users can input an image, along with the fin dimensions, to determine the performance characteristics of a fin, without having to purchase a fin. This project explains the underlying equations that are utilized, the fundamental assumptions that are made, how the results are generated, and how users can interpret the results.
ENGR2022KANG39306 ENGR
RC/Semi-Autonomous Quadcopter
Type: Undergraduate
Author(s):
HyunMyung Kang
Engineering
Omar Hussein
Engineering
Rose Ibarra
Engineering
Nhu Le
Engineering
Emmanuel Matthews
Engineering
Natalia Perez
Engineering
Advisor(s):
Morgan Kiani
Engineering
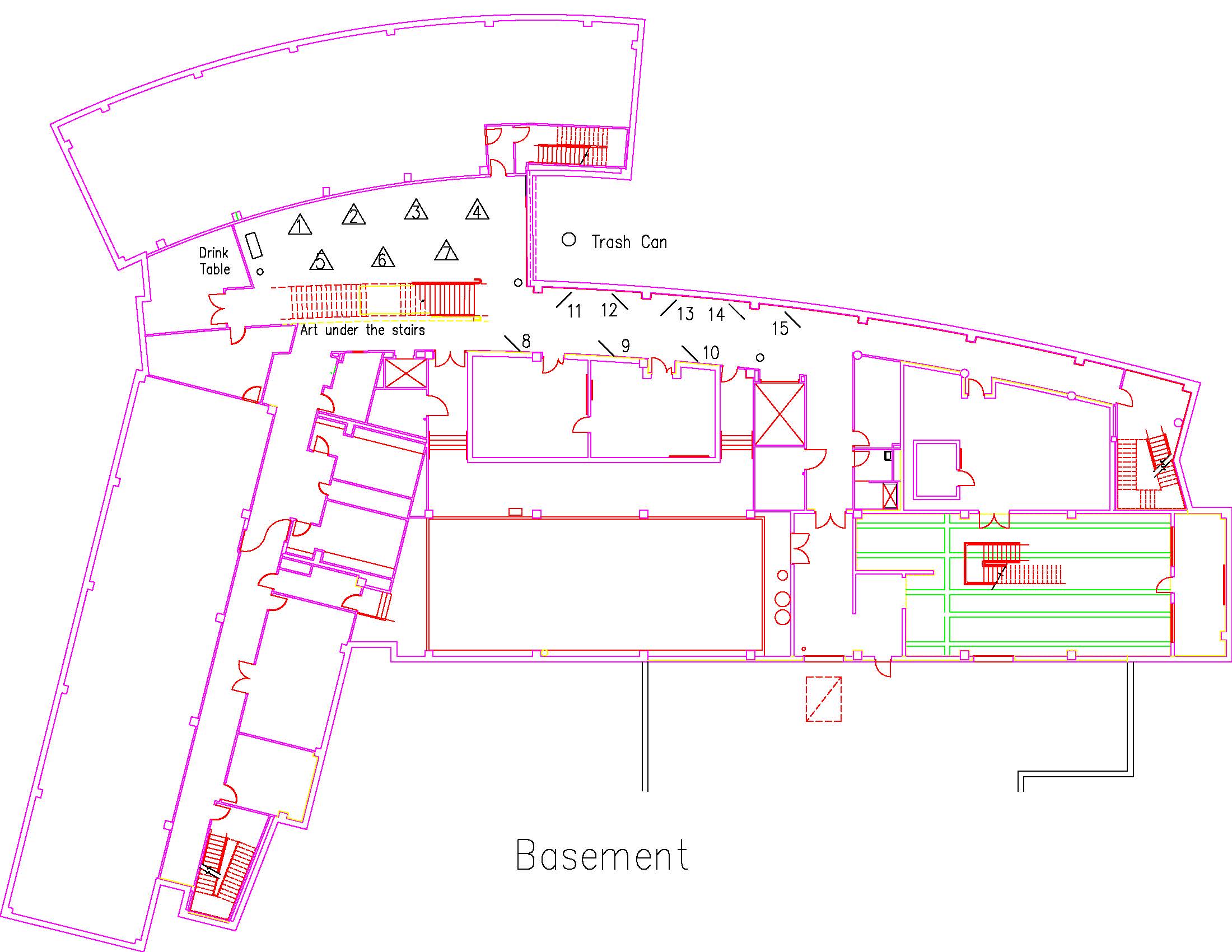
Location: Basement, Table 11, Position 1, 11:30-1:30
View PresentationAutonomous drones have been commercially available for decades. The integration of sensors has allowed robots to interact with their environment and resulting in autonomy. This quadcopter team takes on the challenge of creating an autonomous quadcopter using a frame, motors, electronic speed controllers, propellers, a Raspberry Pi, and an RPLidar. The team achieved remote control flight of the drone through pre-installed software—QGroundControl. The onboard computer will collect data using the RPLidar sensor and then send the data to the flight controller. Setting the robot (talker) and the virtual machine (listener) as nodes, they can communicate with each other through the ROS master.
ENGR2022NOLAN36467 ENGR
Generative Design for Manufacture
Type: Undergraduate
Author(s):
Connor Nolan
Engineering
Corban Anderson
Engineering
Antonio Malvar Gonzalez
Engineering
Jose Miranda
Engineering
Advisor(s):
Robert Bittle
Engineering
Location: Second Floor, Table 6, Position 2, 11:30-1:30
View PresentationGenerative design implementation in this project had the goal of replacing sheet metal structures previously used to hold relays and electromechanic switches with 3D printed structures. The generative design software has the benefit of minimizing the mass of the structure, while keeping its structural integrity. The software does this by iterating through designs solving for stresses at each step, deciding where it is better to place a structure and then cutting mass at points where the structural integrity would not be compromised. Although the software creates a design on its own the user must define certain parameters: the preserve geometry (fundamental geometry for operation), obstacle geometry (sections that the software should leave without obstruction), the expected load case, manufacturing method, and material to be used. The end result is that the computer creates most efficient parts, allowing for a plastic 3D printed part to be able to safely replace one made of metal.
ENGR2022ORR4856 ENGR
Human Ventilation Model for Medical School Students
Type: Undergraduate
Author(s):
Kaily Orr
Engineering
Advisor(s):
Tristan Tayag
Engineering
Robert Bittle
Engineering
Nina Martin
Interdisciplinary
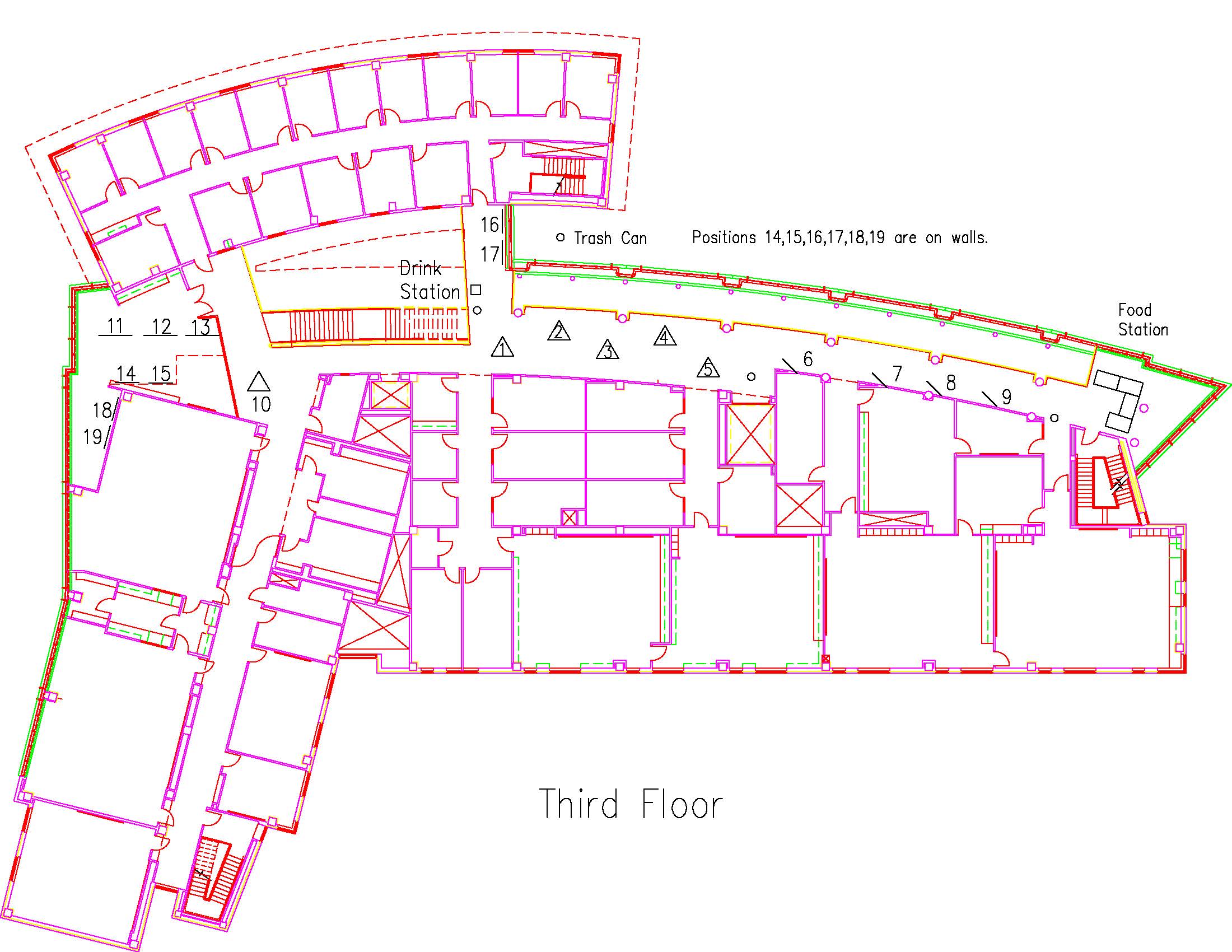
Location: Third Floor, Table 5, Position 2, 11:30-1:30
(Presentation is private)Humans are complex beings that take in a variety of information in a variety of different ways. Understanding that every person processes information in a different way is an important pathway in determining class structure and the method in which information is delivered to students. Students are typically multimodal learners but have a preference for certain learning methods over others. These include but are not limited to lectures, videos, reading, or having a hands-on experience. Professors have the opportunity to enhance the learning environment of their students by either tailoring their teaching method toward individual students, or by using a teaching method that acknowledges and uses each form of learning. The objective of this project is to develop a human ventilation model and corresponding video that can be used during the Case Application Session (CAS) within the Pulmonary Module at the TCU School of Medicine.
ENGR2022RAPISURA64007 ENGR
Additive Manufactuing Using 3D Printing
Type: Undergraduate
Author(s):
Carson Rapisura
Engineering
Angel Fripp
Engineering
Brian Ridzik
Engineering
Carter Wittschiebe
Engineering
Advisor(s):
Robert Bittle
Engineering
Location: Basement, Table 10, Position 2, 1:45-3:45
View PresentationHiller Measurements requested a mechanical design process to produce the internal chassis of their customized aerospace test equipment. The 3D printing team explored additive manufacturing to produce the generatively designed chassis using an MSLA 3D printer and photopolymer resin. The team improved production quality by standardizing support, raft, and print speed settings. Troubleshooting common 3D printing errors included reducing the effects of elephant’s foot, minimizing peeling forces, and adjusting FEP film tightness. Post-processing involved exploring the effect of cure time on material performance by utilizing dynamic vibration testing and tensile & compression testing. Final assessments were made by considering the ease of assembly of all parts and holders. 3D printing was determined to be an effective tool for production when the parts are designed for manufacturing and when the material properties are in accordance with its desired functionality.
ENGR2022SANDOVALAGUILAR32033 ENGR
Microgrid for a Cluster of Grid Independent Buildings Powered by Solar and Wind Energy
Type: Undergraduate
Author(s):
Raquel Sandoval Aguilar
Engineering
Advisor(s):
Efstathios Michaelides
Engineering
Location: Basement, Table 6, Position 2, 11:30-1:30
View PresentationThe reduction of CO2 emissions and the avoidance of Global Climate Change necessitate the conversion of the electricity generation industry to rely on non-carbon sources. Additionally, the mitigation of the duck-curve effects in microgrids requires the development of grid-independent buildings. Computations were performed for a cluster of one thousand grid-independent buildings in the North Texas area, where air-conditioning demand is high in the summer months. The electricity demand is balanced with energy supply generated from wind turbines, photovoltaic cells, or stored energy in hydrogen tanks. The results indicate that with one wind turbine operating, each building must be fitted with 10.2 kW rating photovoltaics capacity and a tank with 5.2 m3 of hydrogen storage capacity to satisfy the hourly demand of the buildings’ community. The addition of more wind turbines significantly reduces the needed PV rating but increases the required storage. Investing in energy conservation measures in the buildings significantly reduces both the needed storage capacity and the PV cell ratings.
ENGR2022TREXLER14848 ENGR
Adapting Procedures for Non-Technical Use
Type: Undergraduate
Author(s):
Elizabeth Trexler
Engineering
Joseph Barnes
Engineering
Daniel Perez
Engineering
Jennifer Rios
Engineering
Jack Wenberg
Engineering
Advisor(s):
Robert Bittle
Engineering
Location: Third Floor, Table 4, Position 1, 11:30-1:30
View PresentationThe overall purpose of this project is to create a process for designing and manufacturing a Chassis (Mechanical Enclosure) for Hiller Measurements. As the Industrial Optimization sub-team, we focused on ways to optimize and fully document the process. The goal was to create procedures for utilizing 3-D generative design and printing software that most adults would be able to follow. Outside TCU students with little to no engineering background were brought in to test our procedures.
ENGR2021HERENDEEN60975 ENGR
A Continuous Feed and Return System for a Rotary Drier
Type: Undergraduate
Author(s):
Jim Herendeen
Engineering
Advisor(s):
Robert Bittle
Engineering
Location: Zoom Room 6, 12:54 PM
View PresentationThe purpose of this project is to create a closed loop system that will enable a continuous drying cycle of mined limestone through a rotating cylindrical dryer. Our client, Lhoist North America, has tasked us with designing this system, and our biggest issue has been putting together the system on a limited budget. We have determine that the most efficient method of designing the system is to used scrapped equipment that Lhoist has available and reconfiguring it for our design, rather than buying a new system. Another challenge we have faced is the method of transporting the mined limestone due to its sand-like qualities. We believe that the most effective method of designing the system will be by altering scrapped material from Lhoist’s scrapyard to complete a closed loop system of the limestone for the rotary dryer.
ENGR2021HOYLE51195 ENGR
Lhoist Senior Design
Type: Undergraduate
Author(s):
Zachary Hoyle
Engineering
Advisor(s):
Robert Bittle
Engineering
Location: Zoom Room 2, 01:02 PM
View PresentationDryer Testing
The parameters which were used to test the dryer was that the incline was set at 5 degrees, and the dryer rpm was at 5 and 10. Further, we used four rows of 90-degree lifters followed by four rows of radial lifters. We tested using a small grain limestone sample to be a middle of the road test. Originally, we started testing with one scoop (one quart) inside the cylinder, started the motor and turned to the 10 rpm, and added one quart every ten seconds until 4 total scoops were through the cylinder. The time this took was consistently right around the 90 second mark. However, when the volume was turned up, the findings were more interesting. When we started with a full five gallons inside of the cylinder, turned the motor up until 10 rpm, and added another five gallons at the 30 second mark, the time that it took for all of the material to exit the cylinder was right around the 90 second mark, the same time as when only a gallon of material went through the dryer.
ENGR2021LY50883 ENGR
An Efficient Low-Cost Notification System For Technical Support Request Via Internet of Things
Type: Undergraduate
Author(s):
Jeremy Ly
Engineering
Kien Nguyen
Computer Science
Advisor(s):
Sue Gong
Engineering
Liran Ma
Computer Science
Location: Zoom Room 2, 01:10 PM
View PresentationWe accumulate several cloud services on Amazon Web Services (AWS) into developing a serverless system in the cloud that replaces the current technical support request, which occurs via calls, in a classroom setting. The instructor can notify the so-called IT person with a press on the programmable Internet of Things (IoT) button. We plan to deploy the system at our university as a way for class instructors to request help without interrupting the lecture. The system is low-cost thanks to AWS's pay-as-you-go policy and easy to install.
ENGR2021NGUYEN37327 ENGR
Renewable Energy: Fossil Fuels to Renewables Substitution – The Effect of Electric Vehicles
Type: Undergraduate
Author(s):
Viet Nguyen
Engineering
Advisor(s):
Efstathios Michaelides
Engineering
Location: Zoom Room 1, 02:47 PM
(Presentation is private)The most viable path to alleviate the Global Climate Change is the substitution of fossil fuel power plants for the generation of electricity with renewable energy units. The substitution requires the development of very large (utility-level) energy storage capacity, with the inherent thermodynamic irreversibility of the storage-recovery process. Currently the world also experiences a significant growth in the numbers of electric vehicles, which use very large batteries. A fleet of electric vehicles is equivalent to a relatively efficient storage capacity that may be used to supplement the energy storage system of the electricity grid. Calculations based on the demand-supply data of a large electricity grid show that, even though a fleet of electric vehicles cannot provide all the needed capacity for a large electricity grid, the superior round-trip storage efficiency of batteries significantly reduces the energy dissipation associated with the storage and recovery processes. A very small amount of battery storage significantly reduces the dissipated energy in the electricity grid. Also, improvements in the round-trip efficiencies of batteries are three times more effective than improvements in hydrogen storage systems.
ENGR2021ROESKE35892 ENGR
Lhoist North America Dryer
Type: Undergraduate
Author(s):
Kyle Roeske
Engineering
Advisor(s):
Robert Bittle
Engineering
Location: Zoom Room 4, 01:26 PM
View PresentationThe dryer is a steel cylinder, approximately 36 inches in diameter and five feet in length. The cylinder also spins at a rate up to 10 rpm. The inside surface contains 48 lifters. These lifters have two variants and are made of mild steel. They are designed to move limestone through the cylinder while the cylinder spins.
ENGR2021VANDERBROOK7258 ENGR
Particle Motion in a Rotary Dryer
Type: Undergraduate
Author(s):
Richard Vanderbrook
Engineering
Biology
Advisor(s):
Robert Bittle
Engineering
Location: Zoom Room 6, 03:03 PM
View PresentationThe drying of limestone is usually done industrially in a rotary drum dryer. The purpose of this project is to generate a model that will predict limestone particle motion as it passes through the dryer. By creating an accurate model of the particle movement during the drying cycle, the operator will be able increase the dryer’s efficiency. Using basic physics and through experimental testing, our team was able to produce a model that will provide detail of particle motion inside the dryer.
ENGR2019AGUEROADAME49081 ENGR
Engineering Capstone Project - Computer Vision
Type: Undergraduate
Author(s):
Melina Aguero Adame
Engineering
Susana Murillo
Engineering
Advisor(s):
Stephen Weis
Engineering
Location: Session: 1; Basement; Table Number: 6
View PresentationAs part of one of the engineering capstone projects, a calibration testing system was improved with the aid of computer vision. Computer vision was integrated into this project as a solution to a rotating pedestal calibration test that was previously performed by the naked eye. The main goal of this system was to detect and track a red 635 nm wavelength laser spot with offsets as small as 0.025 inches on a 10 x 10 inch grid accurately and precisely. Designing this system involved three major criteria: camera selection, data processing hardware, and algorithm performance.
The first criteria studied in the design process was the camera. The system required a camera that was compact in size, covered the entirety of the grid at less than 11 inches, and captured high quality images. Furthermore, two main data processing hardwares were explored: Raspberry Pi and a standard test laptop. The processing hardware criteria considered were speed, portability, and maintenance. Finally, RGB and houghcircles were the two algorithms used to detect the red laser dot. Testing was conducted to compare the algorithms based on their ability to detect the laser spot, precision in tracking, and repeatability. These design considerations guided the down selects for the final components used in this system.
ENGR2019BIESEMEIER44452 ENGR
Design and Development of an Actuation and Extraction Force Tester: Programming
Type: Undergraduate
Author(s):
Thomas Biesemeier
Engineering
Zach Hollis
Engineering
Ben Krause
Engineering
Talha Mushtaq
Engineering
Advisor(s):
Robert Bittle
Engineering
Location: Session: 2; 3rd Floor; Table Number: 3
View PresentationThe LabVIEW team for the Applied Avionics Inc. project focuses on fully integrating the programming of all electrical components with LabVIEW. The major requirements for this project include utilizing LabVIEW to display and capture data feedback, completely automate the testing process, and to read and send data directly to AAI’s database. By creating an actuation and extraction feedback machine that is fully LabVIEW controlled, a variety of switch body types were able to be accommodated and tested. The machine has been shown to decrease variability of results and improve the efficiency of AAI’s current process in all aspects required.
ENGR2019DECK64177 ENGR
HyPIR Electrolysis for Potassium Hydroxide Solutions at Different Laser Specifications
Type: Undergraduate
Author(s):
Trystan Deck
Engineering
Aliesha Rau
Engineering
Advisor(s):
John Fanchi
Engineering
Location: Session: 2; 2nd Floor; Table Number: 9

View PresentationWe are presenting a method referred to as Hydrogen Production by HyPIR Electrolysis. The method increases the rate of hydrogen production from a 1 molar potassium hydroxide and water solution under 6 volts when an infrared laser is irradiated with an optimum wavelength of light through a cell and concentrated on exposed copper electrodes. The irradiating light facilitates the dissociation of water by stretching the hydrogen oxygen bonds and increasing the rate of hydrogen production. Production of hydrogen due to the class 4 laser is altered by the specifications of laser energy, pulses per second, and spot size.
ENGR2019DEVOOGHT49649 ENGR
FDM 3D Printing Mechanical Property Testing
Type: Undergraduate
Author(s):
Luke Devooght
Engineering
Melina Aguero
Engineering
Advisor(s):
Becky Bittle
Engineering
Location: Session: 2; Basement; Table Number: 6
View PresentationIn this experiment, the mechanical properties of 3D printed specimens of different printing parameters were tested under tension. The printing parameters of these specimens were: surface resolution, infill density, and print orientation. Parts were printed in Onyx nylon with a Fused Deposition Modeling (FDM) printer called the Markforged Onyx Pro. Factorial sets of specimens using all various parameters are printed and tested to create a reference table for future engineering projects. Specimens are then printed as composite variations with continuous fibers in order to understand the benefits a composite may have.
ENGR2019NIKOLAI12345 ENGR
Stock Car Suspension Stiffness Ratio Analysis
Type: Undergraduate
Author(s):
Danny Nikolai
Engineering
Advisor(s):
Mike Harville
Engineering
Location: Session: 1; 2nd Floor; Table Number: 6
View PresentationA racecar’s suspension is one of the key contributors to its performance on a track. Each component – springs, shocks, links, etc. – can be dealt with as a variable within a mathematical model. There are hundreds of combinations of these variables, with each change affecting the stiffness ratio. Using the sway bar as the variable of interest, data acquisition, and computer modeling, a mathematical was developed for predicting the stiffness ratio as a function of sway bar diameter. This model can simplify the time-consuming iterative process that is “racecar setup” by allowing a race team to plug numbers into an equation to make predictions instead of conducting on-track test sessions to determine the results of each component change.
PDF: Attached to this email.
ENGR2019PRASAI24291 ENGR
Remote Controlled Robotic Arm Vehicle
Type: Undergraduate
Author(s):
Chris Prasai
Engineering
Mike Tran
Engineering
Advisor(s):
Morgan Kiani
Engineering
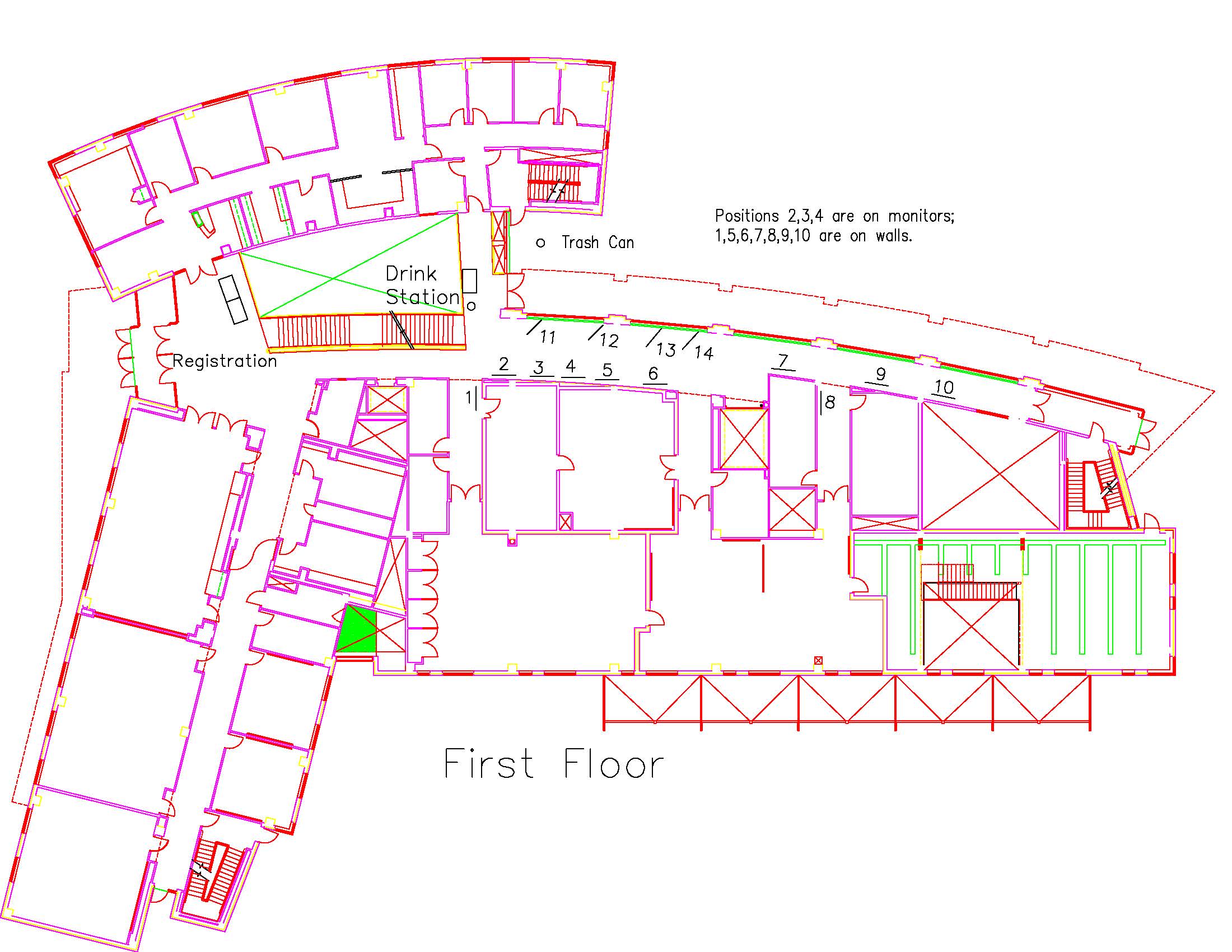
Location: Session: 1; 1st Floor; Table Number: 2
View PresentationIn our project, image tracking was employed to provide a honing mechanism for a robotic "scorpion tail" attached to a small Remotely Controlled Vehicle. The car will be controlled wirelessly through a web interface, with mobile phones being the target user. Like the Mario Kart Versus Mode, where multiple cars drive and bump into each other, the vehicle will be controlled wirelessly while the "tail" is actively seeking targets and upon close proximity will "pop" the balloon. Each car will have 3-5 balloons to start, and the objective of the tournament will be to hunt down the remaining cars and “pop” their balloons, until all cars lose their balloons and the victor remains with at least one balloon intact. Python and Google Cloud were used to make a server with for the mobile website, and C++ was used to relay the commands sent wirelessly to the vehicle's two DC motors. Image tracking was implemented using the popular computer vision OpenCV library in python. The research will conclude with a tournament on Pi day (March 22, 2019).
ENGR2019PRASAI45528 ENGR
Object Detection and Retrieval Using Low-Cost Autonomous Robotic Vehicle
Type: Undergraduate
Author(s):
Chris Prasai
Engineering
Michael Chau
Engineering
Armando Romero
Engineering
Mike Tran
Engineering
Advisor(s):
Morgan Kiani
Engineering
Location: Session: 2; 1st Floor; Table Number: 2
View PresentationIn our project, we aimed to design an autonomous rover similar to that of the popular Mars rovers such as Curiosity. Our rover employs a differential drive system with two continuous rotation servo motors that are controlled with the popular ROS robotic programming library in C++ and Python. A navigation algorithm employs the known position of the robot gathered from a magnetic encoder on the motors and the multiple optical range fidners placed around the vehicle to avoid obstacles on route to its destination. A camera is employed to detect target objects for simple pick-and-place tasks using its DC motorized gripper placed at the front of the vehicle. We have successfully built this vehicle and will demonstrate its capabilities at the 2019 IEEE R5 robotics competition in Lafayette, Louisiana as well as at the SRS presentation day.
ENGR2019STANEK50106 ENGR
Design and Development of a Beam Expander
Type: Undergraduate
Author(s):
Hannah Stanek
Engineering
Emma Birbeck
Engineering
Advisor(s):
Stephen Weis
Engineering
Location: Session: 1; Basement; Table Number: 9
View PresentationRotating Precision Mechanisms, Inc. (RPM) requested that TCU Senior Design update their current Laser Position Accuracy Test Set, which utilizes a laser to calibrate rotating pedestals. RPM positions this test system at a range of distances from a rotating mirror, passes a laser beam through an optical system to the rotating mirror, and measures the offset of the reflected laser dot in order to test the pointing accuracy and repeatability of their positioners. RPM requested that the redesigned test set deliver a reflected laser dot size within 0.125 inches when the test system is any distance between 10 and 100 feet from the rotating mirror. Our prototype for the redesigned Laser Position Accuracy Test Set relies on an optical component called a beam expander to cleanly extend the laser beam at the desired dot size over the specified range of distances. In order to design and manufacture this beam expander, our team researched optical collimators, beam expanders, and lenses in addition to using an Optical Ray Tracing software to model potential beam expander designs. After constructing and testing a working prototype, we completed several iterations in order to improve the resulting laser dot size. Finally, we compared our beam expander design to an Edmund Optics research grade beam expander to further quantify the success of our design.
ENGR2019THACH59309 ENGR
Design of Robotics Vehicle with Autonomous Navigation And Obstacle Avoidance
Type: Undergraduate
Author(s):
Bao Thach
Engineering
Sam Adams
Engineering
Ben Krause
Engineering
Irene Kwihangana
Engineering
Chris Prasai
Engineering
Advisor(s):
Morgan Kiani
Engineering
Location: Session: 2; 3rd Floor; Table Number: 4
View PresentationIn our project, a control-theory based algorithm would be employed to develop a small electric vehicle that can self-navigate through an unknown course to arrive at the desired location while avoiding obstacles and walls. This project is an extension of our successful project funded last year, in which we were able to operate a partially autonomous car to run around a location, and generate a virtual map. Our team expects to grant the car full autonomy like a self-driving car and let it travel through a relative abundance of places to create computer models of critical infrastructures without the help of humans. The success of this project will have a broad impact on society. First, this capability would be useful in self-driving cars, which allow drivers to spend their time more productively instead of driving to work or assist disabled people. Second, the car can generate a simulated model of places that help to analyze unknown locations. Finally, the project can surely create a platform for future TCU engineering students to learn about self-driving car technology and machine learning. This project is expected to succeed due to the achievements we gained from the previous project.
The algorithm will be written in Python/ROS, controlled by Raspberry Pi 3, and tested on a walled course constructed by us. It should be able to navigate a course, without having already driven through it. Another special feature is that the car will also precisely arrive at a pre-determined location.
ENGR2019WHITE19751 ENGR
Design of a Mechanical Clutch System for a Programmable Surface
Type: Undergraduate
Author(s):
Caydn White
Engineering
Advisor(s):
Stephen Weis
Engineering
Location: Session: 1; Basement; Table Number: 3
View PresentationFlatfoot and cavus foot are postural issues that affect approximately 40% of people and can be corrected by means of orthotic inserts for shoes. A digitally reconfigurable mold is being developed as a tool for orthotists to visualize and fabricate orthotic inserts. The surface will be formed by an array of solenoid actuators controlled by the orthotist. The patient will stand on the reconfigurable surface while the orthotist evaluates the patient’s needs by manipulating the surface. Once the orthotist is satisfied with the array, the surface position will be held by a clutch system, so the patient can step off the surface and the surface positions can be recorded. This work describes my development of a prototype mechanical clutch for the digitally reconfigurable surface. The result of this project is a proof-of-concept design of an array of twenty-five physical clutch points which may be individually addressed by means of servo motors controlled by an Arduino microcontroller. With the development of this prototype, it is believed that such a control interface could be implemented on a system large enough for an adult human to stand on. This proof-of-concept is a small step in a larger project of developing a full-scale reconfigurable surface by which an orthotist could create posture correcting devices.
ENGR2018DEVOOGHT32056 ENGR
FDM 3D Printing Mechanical Properties
Type: Undergraduate
Author(s):
Luke Devooght
Engineering
Melina Aguera
Engineering
Advisor(s):
Becky Bittle
Engineering
View PresentationIn this experiment, the mechanical properties of 3D printed specimens of different printing parameters were tested under tension. The printing parameters of these specimens were: surface resolution, infill density, and print orientation. Parts were printed in Acrylonitrile Butadiene Styrene (ABS) plastic with a Fused Deposition Modeling (FDM) printer called the Stratasys UPrint SE Plus. Specimens were first printed similar to Stratasys published material properties standards and then tested to form a control on these known properties. Factorial sets of specimens using all various parameters were then printed and tested to create a reference table for future engineering projects.
ENGR2018ELLIOTT14728 ENGR
Rare Earth Elements
Type: Undergraduate
Author(s):
Lindsey Elliott
Engineering
Advisor(s):
Robert Bittle
Engineering
Efstathios Michaelides
Engineering
Ken Morgan
Geological Sciences
View PresentationFrom an engineering perspective, Rare Earth elements have the potential to transform technology in previously unprecedented ways. Their magnetic, luminescent, and electromechanical capabilities are allowing electronic devices to become more compact, reduce emissions, operate more efficiently, and cost less to produce and purchase. Such developments are proving beneficial to the economies of many developed nations because of their use in popular everyday consumer technologies as well as industries such as healthcare and education.
Along with this positive impact comes a political overlay that threatens the longevity of Rare Earth use. Presently, Rare Earths are expensive and dangerous to extract. This is largely due to the fact that they are not found together in large concentrations, so it is only economically feasible to extract them with another material, such as coal. The process of extraction is also hazardous and cumbersome; separating Rare Earths from other materials involves processes with high levels of emissions that may be dangerous to human beings if overexposure occurs. On the other hand, nations with more flexible safety and health regulations are investing in the development of Rare Earths and setting themselves apart as production leaders. Nations with more stringent health and safety regulations are becoming dependent on these nations to provide the Rare Earths for their applications. As a result, leaders in engineering industry can only benefit from Rare Earths if they develop systems that use Rare Earths more effectively than other materials commercially available and develop a reliable business relationship with a Rare Earth supplier. This condition is not likely to be encountered frequently in today's intricate social webs and economic systems.
The possibility of extracting Rare Earths through more efficient, safer processes is becoming recognized as a relevant topic of research. Additionally, investigation into alternatives to Rare Earths in some of the more common applications may allow for safer and less politically charged production methods for many 21st century advancements.
Through literary investigation, this research project seeks to highlight the main characteristics that makes Rare Earths desirable from an engineering perspective, proposed alternatives to Rare Earths based on engineering demands, and the direction of the Rare Earth industry as a result.